����̎������ł��B�@
�@�G���W���̑���Ƀ}�u�`���[�^���g���Ă��܂��B�@�ܘ_�A�ŏI������ׂ������e�͎��@�ɍڂ��Ď������Ă��܂��悧�B

�܂Ƃߔ�
�@�̍~�����̉�]��
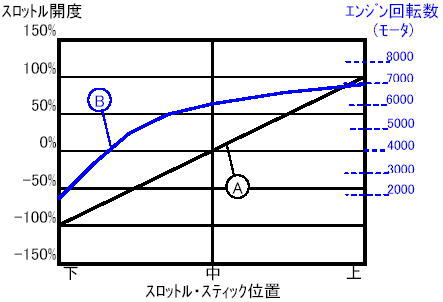
�iA)�̓X���b�g���J�[�u�A�iB)�͂��̃X���b�g���ʒu�ł̃G���W���i���[�^�j�̉�]����\���Ă��܂��B�@�A���n��ɂ��������������̂��̂ł��B


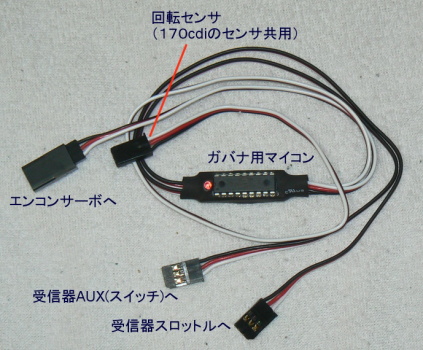
YS DZ170CDI ��p�Ƃ��Đv���܂����B�@�O���[�G���W���Ɏg�p����ꍇ�͉�]�Z���T��t����K�v������܂��B
������@�F�@�K�o�i�[�X�C�b�`��ON���A�X���b�g����1/3�ȏ�̈ʒu�ŃK�o�i�[�������悤�ɂ��Ă��܂��B
��{��]���̓v���|�̃{�����[���Ō��߂Ă��܂��B
�b��Ł@���
�@�̏㏸���̉�]��
6��28��(���j�@�K�o�i�[�̍��ύX
�@���A�{���̔�s�@�p�K�o�i�[�Ƃ��Ďg�������Ԉ���Ă����̂��ȁ[�Ɣ��Ȃ��Ă��܂��B�@����]�Ŕ�����Ƃ���ڕW�ɂ��Ă������Ƃ��Ԉ���Ă����悤�ł��B
����]�ł͢�߂߁E�����n���E�X���[���Z��͎��ɂ͖����ł��B
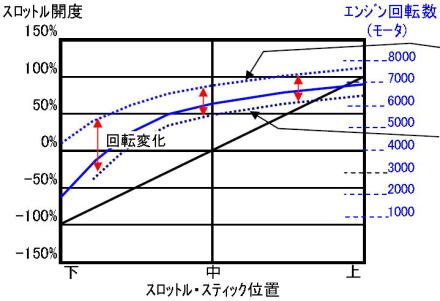
�b��]���āA�Ⴆ�@�̂��~������Ƃ��A�����X���b�g���ʒu�ł̉�]�̕ω��́@�Q�X�g�G���W����d�����[�^�Ɋr�ׂĂS�X�g�G���W���̕����@������i��]�ω������Ȃ��j���Ă��܂���ˁB�@���ꂪ�厖�Ȃ悤�Ɏv���܂��B�@������S�X�g�G���W���͔���₷���A��ʃt���C���[�ɂ��l�C�@�Ȃ̂ł͂Ȃ��ł��傤���B
�X���b�g���ʒu�ɉ����ĉ�]���͑����ł��邪�A���̈ʒu�ł̉�]�ω����w�ǖ����E�E�E�E�@�ڕW�͂���ŗǂ������悤�Ɏv���܂��B�@���̏����`���R�b�Ɛ������܂��B�@���̕\�͈�ʓI�ȃX���b�g���ʒu�ƃG���W���i���[�^�j��]���̊W�ł��B

��{�f�[�^�̐ݒ�
�@��M��̃X�C�b�`����ꂽ����A���ʃ��[�h�ŃX���b�g�����㉺�ɓ������A�G���W�����ō���]�A�A�C�h����]�ɂ��A�K�o�i�[�X�C�b�`���O�D�T�b�ȓ��őf�����n�m-OFF����Ɗ�{�f�[�^�i�ō���]���A�Œ��]���A�X���b�g���̐U�蕝�A�G���R���T�[�{�̋ɐ��j�������I�Ɏ��W����ۑ�����܂��B
�����p�����[�^
���L�p�����[�^�̒����ŃK�o�i�[���D�݂̓����ɒ������邱�Ƃ��ł��܂����E�E�@�@�킪�Ȃ��Ɩ����ł����ǁE�E
�@�@�@�@�@�@�@�@�@���ۂɂ͒�������K�v�͂Ȃ��E�E�E�Ǝv���܂��B�@�[���ɒ�����������ł��̂ŁB
�Q�C���@�@�@�@�@�ϓ�������]�������]���ɖ߂��W���A�P�O�O���ł���Ί��]���Ƀs�b�^���߂邱�ƂɂȂ邪
�@�@�@�@�@�@�@�@�@�����̓C�J�̋��^�}�B�@�ԈႢ�Ȃ��n���`���O�����܂��̂Ł@�����߂̒l�Őݒ肵�܂��B
�Q�C���V���@�@�Q�C���� ���]���ɑ��Ă̗V�т̉�]���i�]�T�j�ŁA���̗]�T���ɂ���K�o�i�[�@�\�́@
�@�@�@�@�@�@�@�@�@�����܂���B
�Q�C�����@�@�@ �Q�C���œ����T�[�{����ʂ͈̔́i���j�@�T�[�{�S����͈͂ɑ��銄��
�ϕ��@�@�@�@�@�@���ԓI�ɂ������Ɗ��]���Ƀs�b�^���i���ۂ͗V�щ�]�����j�߂����߂̌W���A�P�ʂ͕b
�ϕ��V���@�@�@�ϕ�����̂��߂̗V�щ�]���A���͈͓̔��ɂ���ΐϕ�����͓����܂���B
�����@�@�@�@�@�@�ݒ肪����̂ŃV�X�e�����̌Œ�萔�Ō��߂Ă��܂��B�@�����𑬂����邽�߂̌W���ł��B
2014/6��19��
�@�̍~����A�����Ƀ��[�����Z������ꍇ�A���[�����Z�̒��O�ɃX���b�g��������]����������x���߂܂����A���̂悤�ȑf�l�ł͂��̃G���R�����삪���ɓ���Ƃ���ł��B�@
�ނ������� ���Ă��錴���̓v���y���̕��ׂ̕ϓ����ǂ݂��ăX���b�g���ʒu�����߂Ȃ���Ȃ�Ȃ��E�E�@�@����߂���E�E�E�B
�ȏ�܂��A�V�����K�o�i�[��1600rpm����9000rpm�̉�]�S����J�o�[����悤�ɂ��܂����B�@�X�ɉ��������������P���܂����B�@
�܂Ƃߔ�
8��22��(���j�@�K�o�i�[�̎���i�b��j
�@�K�o�i�[�̒������قڏI���܂����̂Ŏ���i�b��j���E�ɃA�b�v���܂����B�@��������������Δ`���Ă݂Ă��������B
�ŋ߂̉��P���e
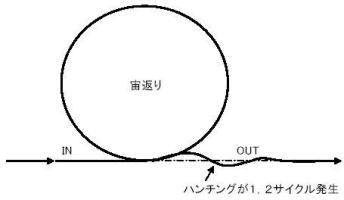
�P�j�����㏸��̐�����s�̓��łP�`�Q�b�ԉ�]����⍂�������̂� �O�D�T�b�ȉ��ɗ}�����B
�Q�j�������~��̐�����s�ʼn�]�Ǐ]���x�������̂�傫�����P�����B

�K�o�i�[���e�X�g���̂u�n�x�`�f�d
�@�P�V�O cdi

�R���V���i���j�@���g�_���p�[
�@�K�o�i�[�̐��x�����シ��ƃn���`���O���t���܂Ƃ��܂����A�Ԃ̃T�X�̃_���p�[�Ɠ����悤�ȋ@�\���K�o�i�[�ɑg�ݍ���ł݂܂����B�@�ŏ��͔��g�_���p�[�����ł������A����ł����Ȃ���ʂ��o���̂ŁA�ǂ������Ȃ�Ɓ@���g�̃_���p�[�ɂ��Ă݂܂����B�@�E�E�E�E�E�E�E�E�E�E�@���Ȃ�ǂ��ł��B
���낻��N���Ɏg���Ă�����Ă��ǂ����ȁ[�v���܂��B�@�R����t��ڕW�ɔz�z�������Ǝv���܂��̂� �����b�����҂����������}�Z�B�@(^.^; �@
�V�����K�o�i�[�͂���Ȋ���
�@�X���b�g���Ή�]���͈�ʓI�ȃX���b�g���J�[�u�ɍ��킹�A�ō���]���܂ł͗v��Ȃ��̂Ŏ��p�I�ȉ�]���ɗ}�����Z�b�g�ɂ��ăt���C�g���Ă݂܂����B
�@��]�ω����K�o�i�[�� �r�V�[�b�Ɨ}���Ă���܂��B�@�y�K�T�X�͓d�����[�^�ł��� �܂�łS�T�C�N���̂悤�ȃt�B�[�����O�ł��B�@�����S�T�C�N���G���W���ɂ��̃K�o�i�[���g�p����ƁA���g���N�t���Ȉ��肵����]�t�B�[�����O�ɂȂ�̂ł͂Ȃ��ł��傤���B
�܂��d���@�̓X�^�[�g���Ɖ��Z�I�����œd�r�d�����ቺ����̂� �X���b�g���̈ʒu���傫���ω����܂����A���ꂷ��J�o�[���Ă���Ă��܂��B�@�@�̂��㏸���ł��낤�Ɖ��~���ł��낤�ƃX���b�g���ʒu
�������̉�]���}30��]�ȓ��ɗ}���Ă���܂��̂� �ƂĂ�����₷���Ȃ�܂����B ���������̉��P�ۑ�����������Ă��܂����B
�Ƃ��낪���ۂ̉�]���͍����\�̂悤�ɋ@�̂̏㏸�A���~���̊O���ɉe������A�傫���ω����Ă��܂��B�@�O���̉e����������������@�P�j�S�T�C�N���G���W���A�@�Q�j�Q�T�C�N���G���W���A�@�R�j�d�����[�^�@�̏��ɂȂ�Ǝv���܂��B
�i��]�����㉺�j

�K�o�i�[���@�O�ɂ����Ē������Ă��܂��B�@
| SEO | [PR] ����!�����u���O �����z�[���y�[�W�J�� �������C�u���� | ||
